|
Earhart Project Research Bulletin #70
January 8, 2014
Hawai‘i Undersea Research Laboratory |
 |
 |
 |
| This document will take a little while to load completely as there are 78 images. Please be patient! | ||
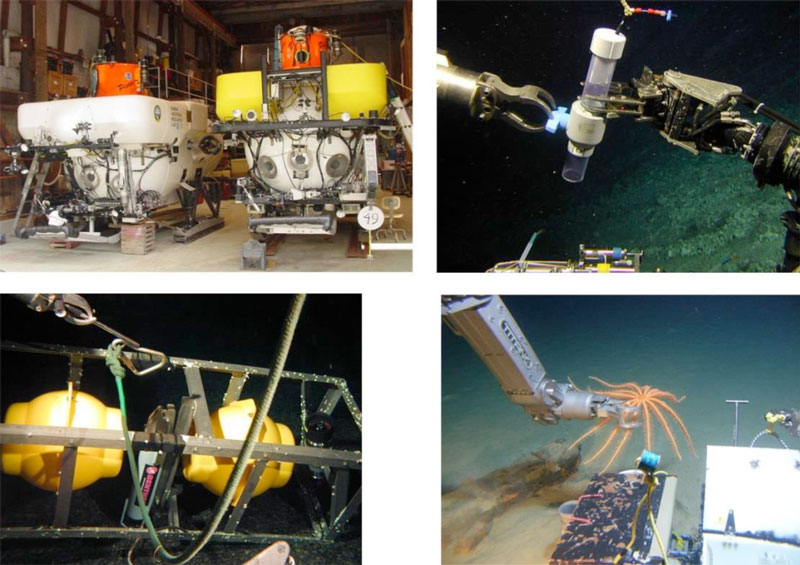
The Hawai‘i Undersea Research Lab operates the deep diving submersibles Pisces IV and Pisces V. The Pisces submersibles have an operating depth of 6500ft (2000m).

The Pisces submersibles operate from the 223ft support vessel R/V Kaimikai-O-Kanaloa (KOK).

The KOK is equipped with a man-rated submersible handling system and tracking and communication systems to support Pisces submersible operations. The KOK is also equipped with a bottom mapping system that allows the ship to map uncharted bottom terrain to give the submersibles updated bottom information prior to a dive. Note: KOK was the support vessel used for TIGHAR’s 2012 Niku VII expedition and the ship’s bottom terrain mapping system was used to chart the undersea topography around Nikumaroro. The Pisces subs were not aboard for the 2012 expedition. Instead, search operations were conducted remotely by Phoenix International using a Bluefin 21 Autonomous Underwater Vehicle (AUV) equipped with side-scan sonar and by Phoenix subcontractor Submersible Systems Inc. using a TRV-M Remote Operated Vehicle (ROV).
 Operational Equipment and Capabilities
Operational Equipment and Capabilities
Pisces IV and Pisces V carry emergency life support for three people for 4-5 days. The Pisces submersibles provide an immediate emergency backup capability for each other. Prior to each science dive season the submersibles conduct two to three test and training dives before starting science dive operations. During these test dives the Pisces pilots conduct emergency sub to sub tracking exercises to maintain proficiency in the event of a submersible emergency.
The Pisces submersibles carry a crew of three, usually one pilot and two observers. The pilot kneels between the two observers’ benches over a chest pad and controls the submersibles propulsion and trim systems from the forward pilot’s panel. The two observers lay down on the two side benches. Crew members can sit up or stand up inside the 7ft diameter command sphere.
 |
 |
|
 |
 |
 Interior command sphere views of Pisces subs. |

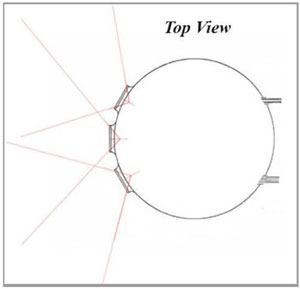
The Pisces submersibles have three forward looking viewports for pilot and two observers. The conical design of the viewports overlaps so pilot and observers can share a view forward of the science sampling rack. The viewports are 3.5″ thick acrylic with a 6″ inside diameter and a 14″ outside diameter. The observer’s viewports are slightly lower than the pilot’s viewport making for good search visibility above and below the level of the viewports.
 |
 |
 |
Each of the Pisces submersibles is equipped with two mechanical arms or manipulators capable of collecting fragile biological samples, artifacts, manipulating instruments, or conducting salvage operations.
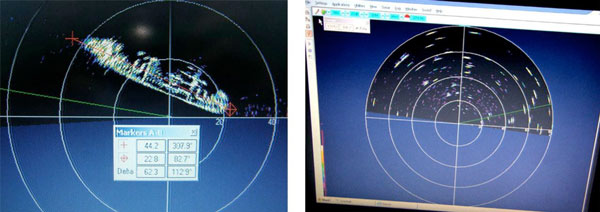 The Pisces submersibles are also equipped with Tritech Sea King scanning sonars that allow the crews to detect bottom features or hard contacts.
The Pisces submersibles are also equipped with Tritech Sea King scanning sonars that allow the crews to detect bottom features or hard contacts.
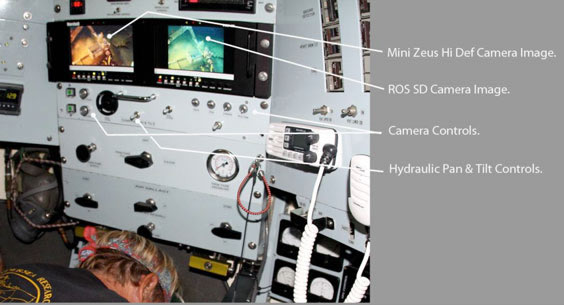
Each of the Pisces submersibles carries two cameras on a pan and tilt mounted on the starboard side of the upper bumper bar. The cameras are mounted side by side on a common pan and tilt with a dedicated 250watt camera light. The outboard camera is a Remote Ocean Systems (ROS) standard definition camera. The inboard camera is an Insite Pacific Mini Zeus High Definition camera.
 |
 |
The ROS camera displays navigation data on the camera image so information such as time, depth, altitude off the bottom, and compass heading is recorded throughout the dive. The data display on the ROS camera can be turned off to record a clean image if needed, but the Hi Def camera is usually the dedicated clean display camera and does not display navigation data. The ROS camera is also fitted with a laser measuring device.
 Submersible Operations Procedures
Submersible Operations Procedures
The submersible crew begins the pre-dive inspection of the submersibles at 5am. The HURL submersible support crew operates with seven crew for multiple two-sub dives.
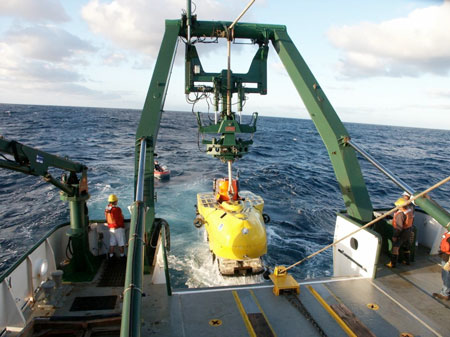
The first Pisces is launched at 8am. Once the first Pisces sub is clear and begins the descent to the bottom, the second Pisces submersible is moved out of the hangar to the back deck, connected to the handling system and launched about 30 minutes after the first sub. Both subs are recovered by 5pm.
Once the submersible is lowered into the water the lift line is slacked off and pulled clear when it comes off the lift hook. The tow line is paid out to 200ft while the pilot completes the in water checks. Once the checks are complete the swimmer jumps on the sub from the waiting chase boat and releases the towline. When the swimmer is clear of the sub and back in the chase boat the Surface Director will radio the submersible pilot that the Pisces is clear to dive.
The submersible pilot will flood soft ballast tanks and begin the descent, calling the depths to the tracking room on KOK every 100m.

 The KOK deck crew will move the second Pisces out of the hangar and in position under the handling system and repeat the launch procedure.
The KOK deck crew will move the second Pisces out of the hangar and in position under the handling system and repeat the launch procedure.
Submersible support crew members will man the tracking room just aft of KOK’s bridge to maintain communications and tracking with both submersibles throughout the dive. Both submersibles are in constant communication with the KOK and with each other. A dive profile for both subs is recorded with the tracking system. Expedition members can monitor the submersible’s progress from the tracking room and communicate with the submersibles anytime throughout the dive.
Both subs will leave the bottom in time to be secured on deck by 5pm. One sub will remain on the bottom until the first sub is recovered and moved back into the submarine hangar on the KOK. When the sub surfaces the KOK will launch a chase boat with operator and swimmer and will start making an approach on the submersible. The swimmer will connect the towline and ride the sub as it is being winched in on the towline. The swimmer will connect the lift line and jump back into the chase boat and the Pisces will be lifted and locked into the tele-arm. The A-frame will be moved in and the sub secured on deck so the submersible crew can exit the sub.
 |
 |
 |
 |
The whole recovery process from the time the Pisces is on the surface to the time it is secured on deck is about 15 minutes. Once both subs are on deck the submarine support crew will begin the post dive servicing to prepare both subs for the next day’s dives. There is usually a post dive science or expedition meeting in the conference room after dinner to review the day’s dive and prepare for the next day’s operations.
The Niku IX Expedition
PLEASE NOTE: Niku VIII went out in June 2015, and did not include the submarines.
The Pisces submersibles are well suited for the Nikumaroro expedition. Pisces IV and Pisces V have conducted science and exploration dives in similar rugged vertical bottom terrain in the Line Islands at Rose Atoll, Kingman, Palmyra, and Jarvis Atolls.
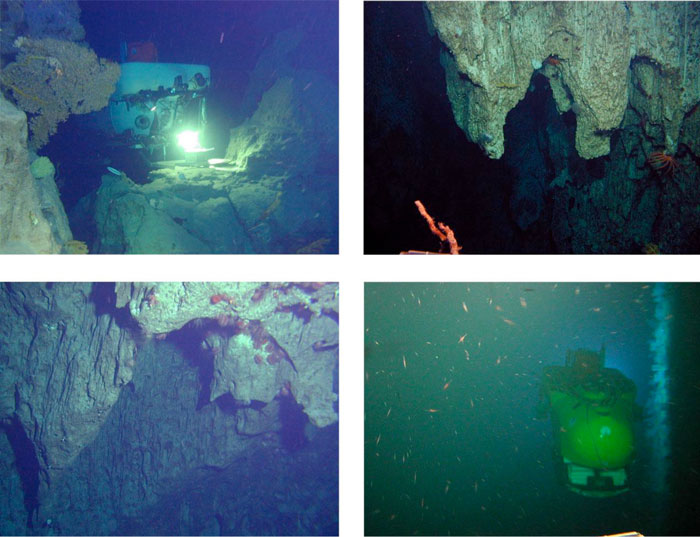
Rugged carbonate terrain with undercuts, caves, spurs and deep erosion gullies that would be a nightmare for an AUV or an ROV is more manageable for HOV’s. The general reef structure of most Pacific Atolls consists of a steep drop from a shallow barrier reef that would require a support vessel with a tethered vehicle to get dangerously close to the reef to operate the vehicle. The Pisces subs can be launched a safe distance off the reef and run in to conduct their search and survey work then run back out to make a recovery.
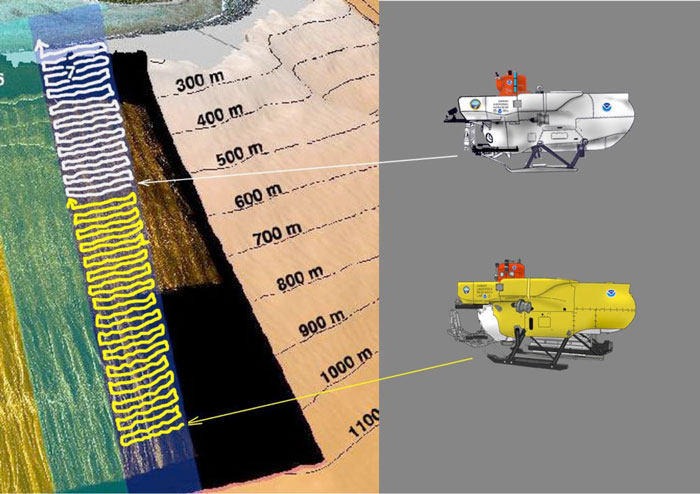
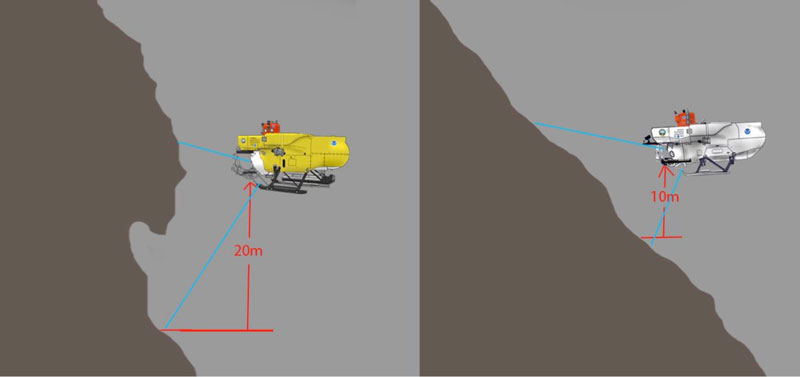
The general plan for the Nikumaroro mission is to cover a one nautical mile wide search area using both subs to conduct 250m wide contour transects with one sub starting at 1000m and one starting at 500m working upslope, ascending 10 to 20m at the end of each transect depending on the steepness of the terrain.

General search area.
Pisces V would launch first and descend to 1000m. Pisces IV would launch 30min later and start at 500m. The submersibles will be monitored by the tracking room watch which would inform the sub crews when they have reached their 250m wide boundary. The subs will ascend and begin a contour search in the opposite direction.
The Pisces submersibles have conducted many surveys of this nature for NOAA’s National Marine Fisheries to study fish habitat. Depending on current, the submersibles should be able to cover the 1 nautical wide search area in about 8 days. TIGHAR has budgeted 10 days on site.
The Pisces have operated in depths as shallow as 20m. Depending on sea conditions and surge the submersibles should be able to cover the shallow search area as well but tracking from KOK will be less effective as the submersibles get into shallow water.
When the Pisces IV and V reach the end of their 250m contour transects, the tracking watch on KOK will inform the subs that they are at the end of their search grid. The Pisces will then move upslope 10 to 20m depending on the terrain, then contour for 250m back in the opposite direction.
The submersible crews will be able to determine how far they can ascend to the next contour and still get complete search coverage of the bottom when they start the next survey transect.
HURL Operations Crew for the Expedition
Terry Kerby is Operations Director and Chief Pilot. Terry has 33 years of submersible piloting experience and has directed submersible diving operations for the Hawai‘i Undersea Research Lab since the program started operations in 1981. Max Cremer is HURL’s Deputy Operations Director and has been with HURL since 1998. Max has over ten years’ experience piloting Pisces IV and Pisces V. Max and Terry will be the primary pilots for the Nikumaroro expedition. |
|
Colin has been with HURL since 2000. Colin is Chief Electronics Technician and has many hours of pilot training in Pisces IV and Pisces V. Colin will have the primary responsibility of keeping the electronics running smoothly for both Pisces subs during this ambitious dive schedule. Colin will serve in the capacity as Surface Director, chase boat operator, swimmer, tracking watch stander and will be an emergency backup pilot for both Pisces subs. |
|
Doug has been with HURL since 2004 and has participated in over 15 submersible science expeditions as a Submersible Support Technician. Doug will serve in the capacity as Submersible Support Tech, Surface Director, chase boat operator, swimmer, and tracking watch stander. Doug, Steve, Colin, Max and Terry make up the core full time crew for the HURL submersible operation. |
|
Pat is another ocean engineering graduate student who has worked with the HURL submersible operation. Pat has participated in several refits for Pisces IV and Pisces V and has experience with at sea operations as a Submersible Support Tech. Pat will serve in the capacity as Submersible Support Tech, chase boat operator, and swimmer. |
|
Rachel Orange is the Hawai‘i Undersea Research Labs Science Data Manager. Rachel has participated in several test and trial dive operations and is adept at tracking and managing two submersibles on the bottom. Rachel has also made numerous Pisces dives as a science observer and HURL Data Manager.
|
|
 Max Cremer and Terry Kerby
Max Cremer and Terry Kerby Colin Wollerman
Colin Wollerman Steve Price
Steve Price Doug Bloedorn
Doug Bloedorn Max Young
Max Young Pat Anderson
Pat Anderson Rachel Orange
Rachel Orange While all submersible operations crews are involved in the launch and recovery of the submersibles, Rachel will be needed to track the approach of the launch site and communicate and track each sub during the launch and recovery operations. Once the subs are on the bottom the sub support crews will stand tracking watches during the dive. Rachel will also be managing all video data from the dives. Rachel will be working with the expedition team for all post processing and review of dive video from the submersibles surveys.
While all submersible operations crews are involved in the launch and recovery of the submersibles, Rachel will be needed to track the approach of the launch site and communicate and track each sub during the launch and recovery operations. Once the subs are on the bottom the sub support crews will stand tracking watches during the dive. Rachel will also be managing all video data from the dives. Rachel will be working with the expedition team for all post processing and review of dive video from the submersibles surveys.Recoveries and Discoveries
The Hawaii Undersea Research Lab has recovered millions of dollars in lost instruments and data as well as made many significant historical discoveries over the years. Many of these recoveries of lost science instruments and vehicles were without the aid of locating beacons or sometimes even accurate positions. This is where the advantage of having the human eyes and brain on the bottom makes the difference in finding hard to locate objects.
The following list is some of the lost instruments and vehicles the Pisces subs have recovered and some of the historic maritime wreck sites the Pisces have discovered. Click on the small images to open larger versions in a new window.
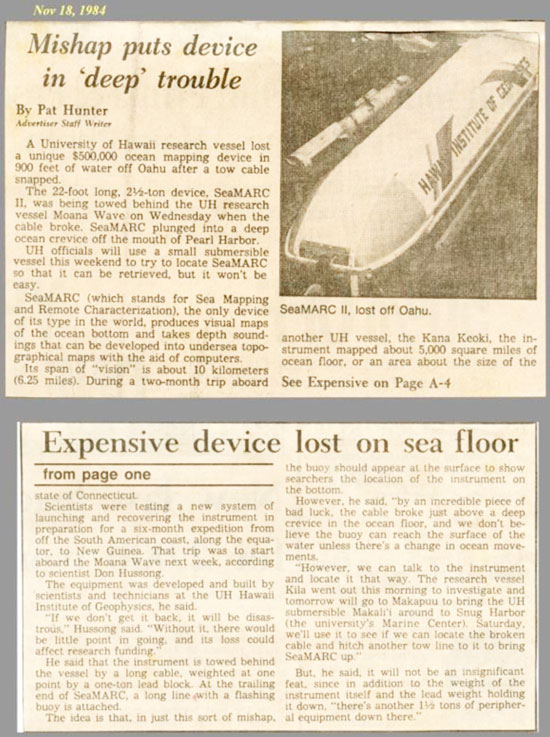
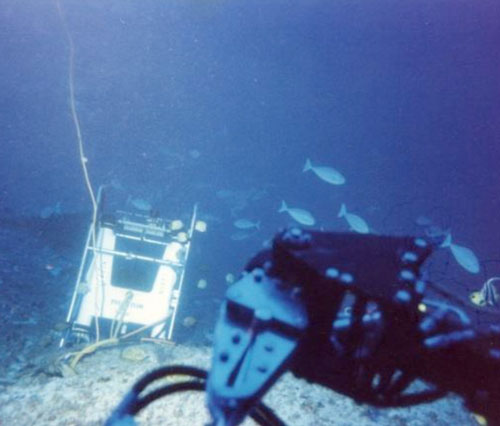
Recoveries SeaMARC II In Nov of 1984 the University of Hawai‘i lost the bottom mapping system SeaMARC II off of South Oahu during test dives. SeaMARC was lost in about 1200ft of water and was suspended 600ft off the bottom held down by the diffuser weight. The sub would not be able to track SeaMARC in mid water so it was necessary to throw a 27khz pinger over the side in the general area of the signal from SeaMARC and search for the diffuser weight. When the Makali’i got to the bottom we discovered that the pinger was sitting next to a Cessna 150. HURL was able to locate and recover SeaMARC in one day. Super Phantom ROV
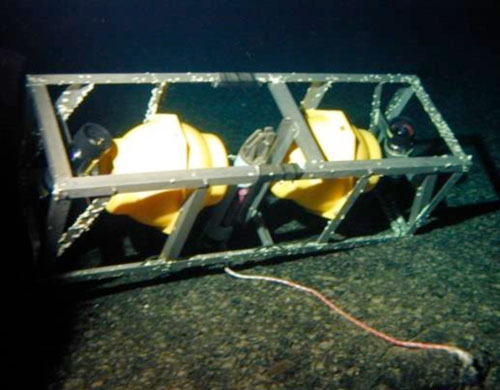
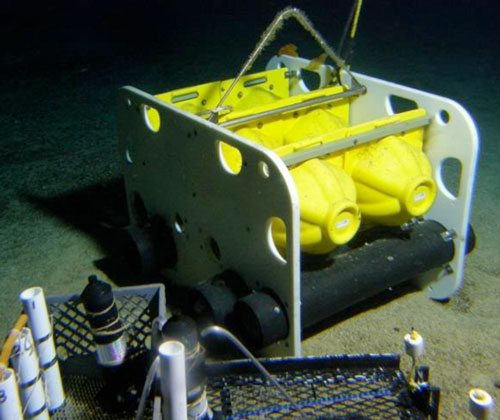
Lost off of the NOAA Ship Townsend Cromwell in January 1989 with no locating beacon and a rough position, Pisces V was able to locate Super Phantom and extract it from the reef in one dive. Deep Tow Camera In August of 2006 the Pisces V was able to locate and recover a deep towed camera in 800m lost off the R/V Kilo Moana a year before. SAIC Laser Bottom Mapping Array In November of 2006 the Pisces IV located and recovered the SAIC Laser Bottom Mapping instrument lost when it was towed into a rocky pinnacle near Maui by the NOAA Vessel R/V Oscar Setti.
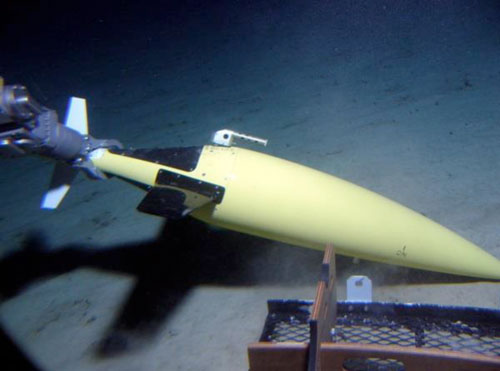
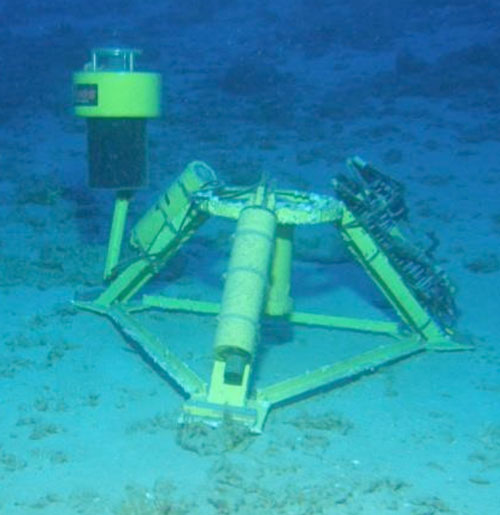
HARP Acoustic Recording Instrument Lost for over a year on Cross Seamount when the release mechanism failed. Pisces V was able to locate the instrument and mechanically release the bottom weight in Nov of 2007. The instrument surfaced and was recovered by the KOK. TOAD Pisces V was able to locate the TOAD instrument in April of 2009 after it had been lost for over a year. This discovery was mostly made by intuition as there was no accurate depth or position and no acoustic beacon to track. Sea Glider 513 The autonomous data gathering Sea Glider 513 departed on a data gathering trip and didn’t come back up. Pisces V was able to locate and recover the instrument in October of 2010. ADCP Another data gathering instrument that did not properly release and return to the surface. This one was an easy recovery as Pisces V descended right over the instrument.
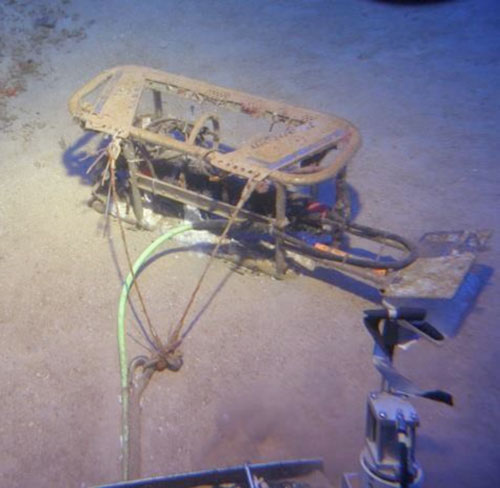
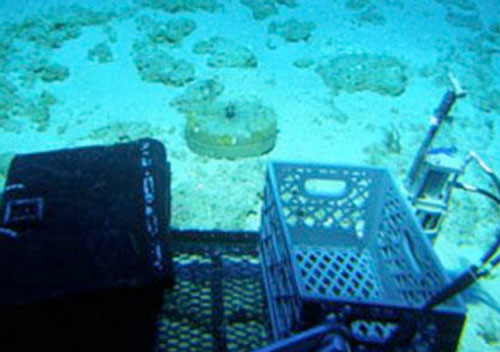
National Marine Fisheries lost data loggers The search for the missing data loggers is a classic example of how effective a search tool a human-occupied vehicle can be locating lost objects on the bottom of the ocean. In August of 2013 the Pisces V was tasked with the mission of locating three data loggers that were part of eight total instruments deployed off of East Oahu in 2008. The instruments were deployed and recovered in 2008 but three of the instruments did not release. National Marine Fisheries felt the data that had been collected were valuable, but not valuable enough to pay for a ship and a submersible to go down and get them.
In 2013 we were doing operations with our LRT-30a launch/recovery platform which is towed behind a much less expensive vessel of opportunity. This system limits HURL to diving in local waters but reduced the day rate for a dive from $40,000 a day to $15,000 a day so NMFS chartered the Pisces V for two days to recover the lost instruments. The data loggers had two 1ft diameter concrete garden steps as bottom weights with the release transponder, data logging instrument and 15ft of polypro line with a buoy.
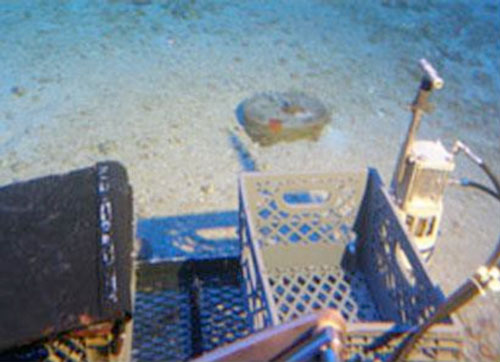
On the first dive we were hoping to find instruments standing off the bottom but eventually located two of the sets of 1ft diameter concrete bottom weights with the remnants of the release transponder attachment indicating that the release had actuated. On the second day’s dive the crew of Pisces V located the third set of concrete garden steps. All three instruments had released but NOAA Chief Scientist considered the dives a success as it not only confirmed the fate of the instruments but proved the effectiveness of using a human occupied vehicle to locate 3 small targets in less than accurate positions and depths that had been on the bottom for 5 years. This mission would have been nearly impossible trying to locate these targets with an ROV looking at a camera image.
These are just a few of the recoveries HURL has made over the years. Discoveries HURL Submersible Operations has discovered about 140 historic wrecks ranging from ships, and aircraft to landing craft and old vehicles. Here are a few of the more notable historic wreck sites HURL has made over the years. Wreck of the Japanese Midget Submarine sunk by the USS Ward on Dec 7th 1941 (two photos). Marshall Mars (five photos). Imperial Japanese Navy 400ft aircraft carrier submarine I-400 (four photos). Imperial Japanese Navy 400ft aircraft carrier submarine I-401 (five photos). Imperial Japanese Navy 378ft aircraft carrier submarine I-14 (four photos). Imperial Japanese Navy 256ft fast attack submarine I-201 (five photos). US Navy LST USS Chittenden County (five photos). US Navy submarine S-4 (four photos). US Navy submarine S-19. In 1995 HURL discovered the tail section of an A-class Japanese Midget Submarine. These submarines were bolted together in three pieces. The tail piece had been disconnected at the flange joint and rigged and dumped in the defensive sea area South of Pearl Harbor. HURL discovered the mid-section in 2000. This section had also been disassembled at the flange joint at the bow but showed evidence of an explosion that had blown off the stern section. This section had also been rigged for disposal. HURL discovered the bow section of the midget submarine in 2001. The bow section had two empty torpedo tubes and the torpedo guard configuration that was used only on the 5 Pearl Harbor attack midget submarines. The bow section was also disconnected at the flange joint and rigged for disposal. Each of the sections was about 60m apart. It is believed that this is the 5th and final midget submarine discovered from the Pearl Harbor attack (seven photos). USS Bennington. Built 1890. Sunk off of South Oahu in 1924 (four photos). SS Claudine. Built 1890, sunk off of South Oahu in 1929 (four photos). SS Helene. Built in 1897. Sunk off of South Oahu in 1929 (five photos). SS Mauna Kea. Built 1908. Sunk off of South Oahu in 1936 (five photos). USS Kailua. Built 1923. Sunk off of Southwest Oahu in 1946 (four photos). Keystone PK-1s from USN Flying Boat Squadron VP-1. 1931-1938. There were only 18 built as part of the flying boat squadron out of Pearl Harbor. HURL has located 4 of them (sixteen photos).