Earhart Project Research Bulletin #63
August 26, 2012
Exploring the Debris Field
Analysis of video taken during the Niku VII expedition has revealed a debris field of man-made objects off the reef at the western end of Nikumaroro.
“Esmerelda,” the Submersible Systems, Inc. TRV-M ROV used during the Niku VII expedition.
TIGHAR photo by R. Gillespie.
During the Niku VII expedition, the high-definition video camera on the Submersible Systems, Inc. TRV-M Remote Operated Vehicle (ROV) captured images of what forensic imaging scientist Jeff Glickman describes as a debris field of man-made objects. The discovery is significant because the debris field is in the place where we had previously reasoned debris from the Earhart aircraft “should” be.
Jeff had previously determined that an object protruding from the water in an October 1937 photograph of the west end of Gardner Island (now Nikumaroro) is consistent with Lockheed Installation 40650, the main landing gear of a Lockheed Electra aircraft. Photo analysts at the U.S. State Department’s Bureau of Intelligence and Research verified Jeff’s findings. If the object in the photo is a landing gear assembly it is probably not far from the spot where the aircraft was washed over the reef edge.
The Bevington Photo. The object protruding from the water on the left is believed to be wreckage left behind when Earhart’s aircraft was swept over the reef edge. TIGHAR copy-photo by Jeff Glickman; courtesy Rhodes House Library, Oxford University.
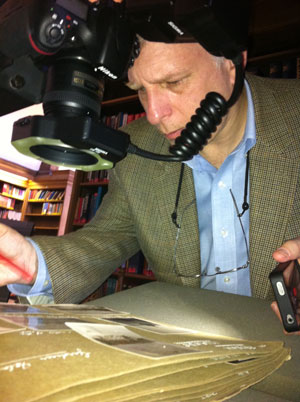
TIGHAR forensic imaging scientist Jeff Glickman. TIGHAR photo by R. Gillespie.
If the aircraft broke up in the surf – as suggested by later reports of airplane parts seen on the reef and shore and artifacts found in the abandoned village – much of the wreck should logically have gone into the deep water adjacent to that part of the reef. Assuming the object in the photo eventually sank, it and other wreckage should be somewhere on the underwater reef slope. The question is, how deep?
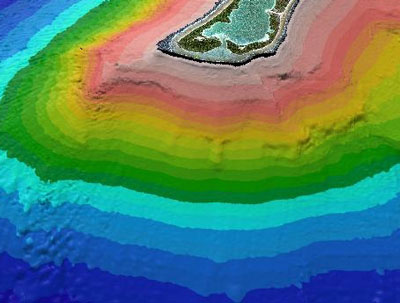
Multi-beam sonar maps of the underwater topography off the west end of Nikumaroro made during the Niku VII expedition show it to be a series of near-vertical cliffs interspersed in places with occasional shelves or moderations in the reef slope. Level sea floor is not reached until 40 kilometers (24 miles) offshore at a depth of 6,000 meters (nearly 20,000 feet). To make matters worse, we found large sections of the reef slope to be unstable and subject to frequent underwater landslides that could easily bury pieces of aircraft wreckage.
This multi-beam sonar map shows the series of near-vertical cliffs that make up the reef slope off the west end of Nikumaroro. TIGHAR map by J. Smith, Ph.D., University of Hawaii
The white lines show the underwater area that, in theory, should contain wreckage from Earhart’s Electra. TIGHAR map by J. Smith, Ph.D., University of Hawaii.
The ROV used during the Niku VII expedition had a maximum depth of about 850 meters (2,800 feet) so, in effect, we were looking for debris from the aircraft that came to rest on a shelf or moderate slope between cliffs and did not get covered by coral landslides that, naturally, tend to accumulate on shelves and moderate slopes. The debris field identified by Jeff Glickman is on a moderate slope near the base of a cliff amid apparent coral debris from landslides. For obvious security reasons, we’re not releasing the exact location and depth of the debris field.
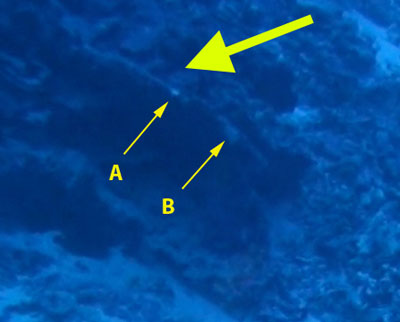
In this still image from the HD video, yellow arrows point to the objects of interest. It’s too early to say whether this is airplane debris but a preliminary assessment of the objects suggests a resemblance to some of the landing gear components in the Bevington photo. Further processing and analysis of the imagery is bringing out more information. One example will serve to illustrate the continuing work being done. Analysis by J. Glickman, Photek
The second arrow from the left marks an object that might be a fender – Lockheed Part Number 42817L or 45101R (the right and left fenders have separate part numbers).
The Lockheed 10 landing gear featured
fenders to prevent mud or slush from
being slung up into the wheel wells.
TIGHAR collection
But what can we expect aircraft aluminum – specifically 24ST ALCLAD – to look like after 75 years in an active coral-growth environment? Douglas TBD-1 Devastator BuNo 1515 in Jaluit lagoon, Marshall Islands, (see To Save A Devastator) survives intact because it is in a benign lagoon, but it too has been in an active coral-growth environment for 70 years. The aluminum on that aircraft has accretions of coral growth over much of its surface.
The nose section of Douglas TBD-1 BuNo 1515 in Jaluit lagoon. TIGHAR photo by J. Ross.
Is the object in the debris field that seems to resemble a fender from the Electra landing gear merely a slab of coral or are we looking at aluminum with a veneer of coral accretion? On the edge of the object facing the camera there are two places where the color is lighter than the surrounding material. One small area, marked A, is quite bright. The other area, marked B, is larger but not as bright. Are these light-colored accretions on top of the coral or are they chips that expose the aluminum beneath the coral veneer?
Analysis by J. Glickman, Photek
Jeff Glickman has been able to determine that the light-colored areas A & B are lower than the surrounding material. They are chips. Whether the exposed surface is metal is still unknown but it may be possible to tell with further analysis.
In this still from the Discovery Channel documentary Finding Amelia Earhart, ROV pilot Wolfgang Burnside and TIGHAR’s Ric Gillespie watch for man-made debris. Discovery Communications.
The debris field was not noticed during the expedition because only Standard Definition video was available in real time. The High Definition video was recorded in the camera and downloaded after the ROV was back on deck. The HD video files could only be converted to a manageable format with time code added after the expedition’s return. These two video clips illustrate the difference between what the ROV pilot and observer were seeing during the mission and the degree of detail that can be seen in the HD imagery. Try playing them simultaneously to see the dramatic difference in clarity.
Standard Definition Video
High Definition Video
There is, understandably, great curiosity about the video footage of the debris field. We’re pleased to release this two minute High Definition video clip that covers the ROV’s pass over the area. The debris field appears 51 seconds into the clip.
A word of caution: Many people will see only coral. Others will see airplane parts that aren’t there. As Jeff Glickman explains:
Much like the “Face on Mars,” the brain has an irrepressible ability to see things where they are not: This is due to the way the brain employs pattern recognition to assemble higher-level visual semantics from the environment. Marine flora and fauna have a nearly infinite ability to generate random patterns which give the brain vast opportunities to see the patterns for objects which don’t exist. This misleads casual observers to “see” non-existent objects.
Photointerpretation depends on the simultaneous application of multiple techniques. Each of these can be viewed as a single dimension of analysis, none of which are reliable individually. However, interpretive ambiguity can be reduced by applying all of these simultaneously.
Differences in organic (natural) vs. man-made shapes.
Texture differences between objects within a neighborhood.
Pattern differences between objects within a neighborhood.
Color differences within multiple color spaces within a neighborhood.
Color absorption differences (spectrometry) between specific objects.
Temporal similarities vs. differences between video frames.
Object size and scale information which may be relative, absolute and ratiometric (mensuration).
Object interaction with its environment.
Location information including absolute position, relative position and context.
Image processing is a valuable asset and enabler for photointerpretation by aiding the interpretation of each of the above dimensions. The interpretation of an object depends upon a the preponderance of evidence in each of the above dimensions at the same time.
We’ll issue further reports as examination, processing and analysis of this and other video from the expedition continues.
Copyright 2021 by TIGHAR, a non-profit foundation.
No portion of the TIGHAR Website may be reproduced by xerographic,
photographic, digital or any other means for any purpose. No portion
of the TIGHAR Website may be stored in a retrieval system, copied,
transmitted or transferred in any form or by any means, whether electronic,
mechanical, digital, photographic, magnetic or otherwise, for any purpose
without the express, written permission of TIGHAR. All rights reserved.













 Is the object in the debris field that seems to resemble a fender from the Electra landing gear merely a slab of coral or are we looking at aluminum with a veneer of coral accretion? On the edge of the object facing the camera there are two places where the color is lighter than the surrounding material. One small area, marked A, is quite bright. The other area, marked B, is larger but not as bright. Are these light-colored accretions on top of the coral or are they chips that expose the aluminum beneath the coral veneer?
Is the object in the debris field that seems to resemble a fender from the Electra landing gear merely a slab of coral or are we looking at aluminum with a veneer of coral accretion? On the edge of the object facing the camera there are two places where the color is lighter than the surrounding material. One small area, marked A, is quite bright. The other area, marked B, is larger but not as bright. Are these light-colored accretions on top of the coral or are they chips that expose the aluminum beneath the coral veneer? In this still from the Discovery Channel documentary Finding Amelia Earhart, ROV pilot Wolfgang Burnside and TIGHAR’s Ric Gillespie watch for man-made debris. Discovery Communications.
In this still from the Discovery Channel documentary Finding Amelia Earhart, ROV pilot Wolfgang Burnside and TIGHAR’s Ric Gillespie watch for man-made debris. Discovery Communications. Much like the “Face on Mars,” the brain has an irrepressible ability to see things where they are not: This is due to the way the brain employs pattern recognition to assemble higher-level visual semantics from the environment. Marine flora and fauna have a nearly infinite ability to generate random patterns which give the brain vast opportunities to see the patterns for objects which don’t exist. This misleads casual observers to “see” non-existent objects.
Much like the “Face on Mars,” the brain has an irrepressible ability to see things where they are not: This is due to the way the brain employs pattern recognition to assemble higher-level visual semantics from the environment. Marine flora and fauna have a nearly infinite ability to generate random patterns which give the brain vast opportunities to see the patterns for objects which don’t exist. This misleads casual observers to “see” non-existent objects.
