Click HERE to go to the Niku VII Daily Reports page.
On July 3, 2012 – the 75th anniversary of the U.S.S. Colorado’s departure to search for Earhart – TIGHAR’s Niku VII expedition sailed from Honolulu to conduct a search for the Earhart Electra in the waters adjacent to Nikumaroro. This is the hi-tech deep water search we’ve long wanted to do but could never afford.
The purpose of the Niku VII expedition is to conduct a thorough search of the underwater reef slope off the west end of Nikumaroro for surviving wreckage from Amelia Earhart’s Lockheed Electra. Nikumaroro, formerly Gardner Island, is an uninhabited coral atoll in the remote Phoenix Group, part of the Republic of Kiribati. The search area has been defined through interpretation of the available evidence. The search methodology and technology has been selected through consultation with the best available sources.
The objective of the expedition is to locate, identify, and photograph any and all surviving aircraft wreckage. No recovery of wreckage is contemplated. If wreckage is found, the imagery acquired on this expedition will be used to mount a subsequent recovery expedition equipped to safely retrieve and properly conserve whatever remains of NR16020. (Click on the small image at right to open a much larger version in a new window.)
Search Area
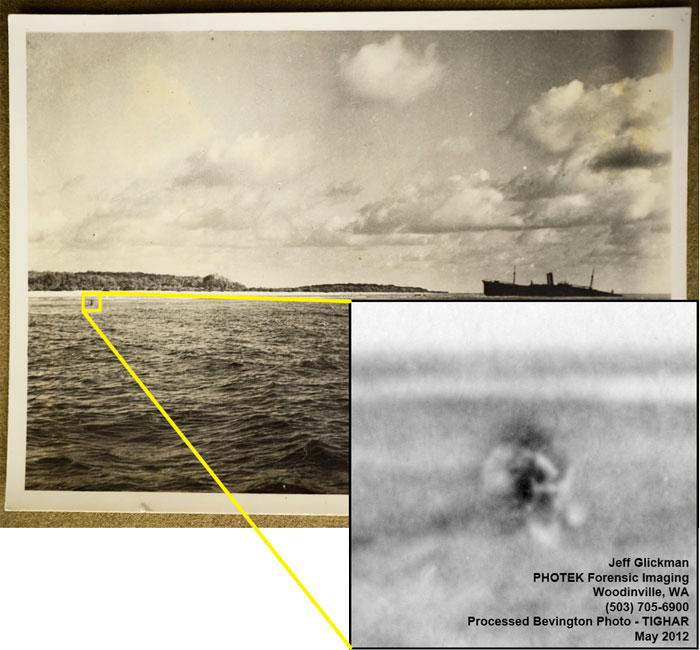
The primary search area is based upon the hypothesis that the aircraft landed safely on the reef and remained there for several days before being washed over the reef edge by rising tides and surf at or near the point where the object on the reef – thought to be a detached landing gear assembly – appears in the 1937 Bevington Photo. (Click on the small photo at right to open a much larger version in a new window.)
Aircraft debris reportedly found and used by island residents in later years, and aircraft parts found by TIGHAR in the abandoned village strongly suggest that the aircraft broke up in the relatively shallow surf zone. No large components (engines, main beam, etc.) seem to have washed ashore, nor has any debris been seen during scuba-depth surveys of the reef slope. This expedition will test the hypothesis that the more massive parts of the aircraft traveled down the reef slope and came to rest in, as yet, unexplored depths.
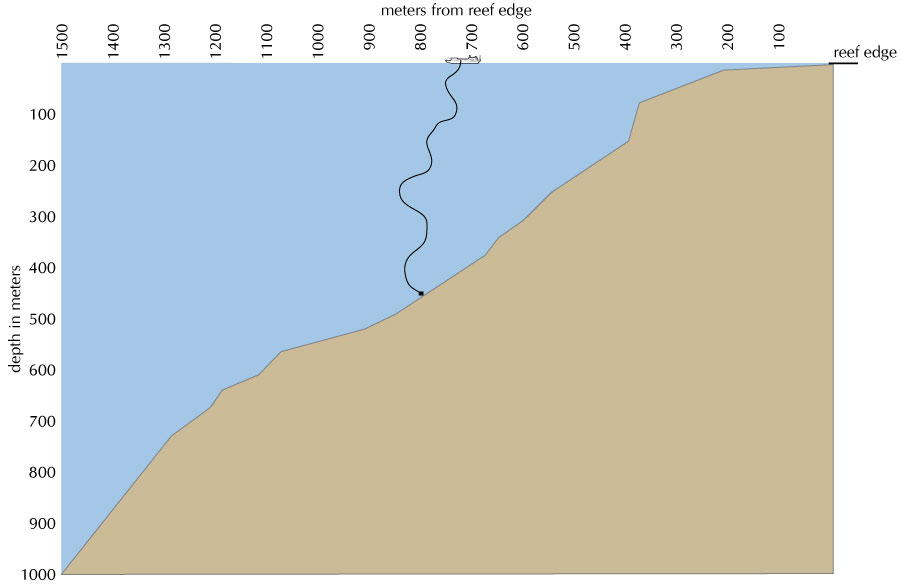
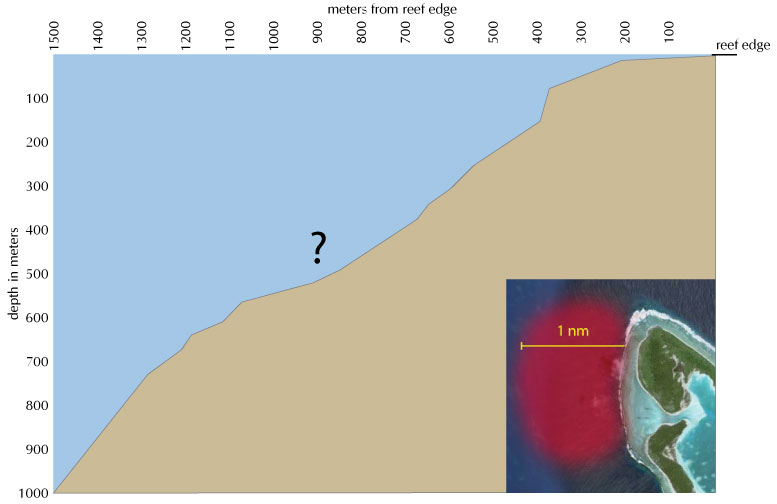
The Niku VII expedition will have the capability to search with high-frequency side-scan sonar and take black & white photos down to a depth of 1,500 meters (4,921 ft). The expedition will be able to do detailed examination of sonar targets using high-definition video down to a depth of 1,000 meters (3,300 ft.). The available bathymetry indicates that the reef slope reaches that depth more than a mile out from the reef edge. If the hypothesis is correct, the wreckage should be well within the proposed search area. (Click on the small image at left to open a much larger version in a new window.)
Search Methodology
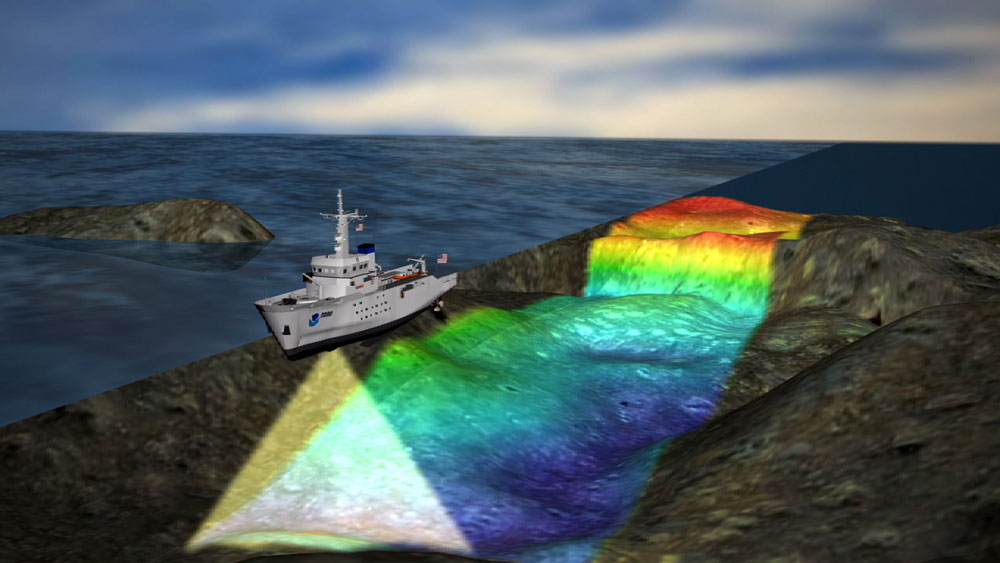
Step 1. Map the search area using multi-beam sonar hull-mounted on the expedition vessel, supplemented in shallower areas by multi-beam sonar mounted on the Autonomous Underwater Vehicle (AUV). (The image at right opens a larger image in a new window.)
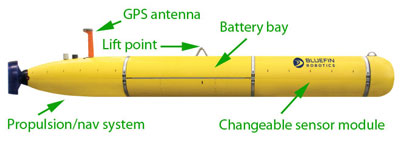
Step 2. Search the mapped area with side-scan sonar mounted on the AUV. The AUV is an unmanned, free-swimming robotic submersible that is programmed to carry out a particular search mission using its own onboard inertial navigation system. It is battery-powered and has a potential endurance of up to 24 hours, although our missions will be much shorter – probably no more than six hours. At the end of a mission the AUV is recovered, the data it has collected are downloaded, the batteries are swapped out for fresh ones, and the AUV is reprogrammed and launched for another mission. The data downloaded from the first mission are then analyzed and any targets of interest flagged for future investigation.
Side-scan sonar produces the clearest image when the target is on a flat sandy bottom. Our potential targets are not on a flat sandy bottom. This will be a difficult search.
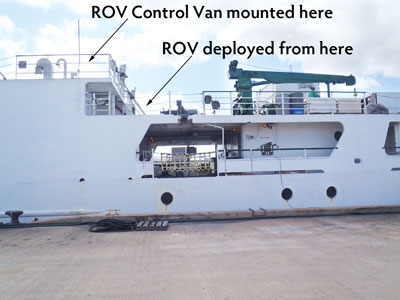
Step 3. When the AUV has concluded its coverage of the search area, the collected sonar data have been analyzed, and a list of targets of interest has been compiled and prioritized, a Remote Operated Vehicle (ROV) will be deployed to investigate the targets. The ROV is tethered to the expedition vessel and is “flown” to the desired location by an operator in a dedicated control van installed aboard the expedition vessel. The ROV is equipped with sector-scan sonar to help re-locate the target. It has powerful lights and high-definition video cameras to provide real-time imagery to the operator. A manipulator arm can be used to remove obscuring objects. (The image at right opens a larger image in a new window.)
Search Technology
The overall contractor for managing the search operation is Phoenix International Holdings, Inc., the U.S. Navy’s primary contractor for deep ocean search and recovery.
The AUV will be a Bluefin Robotics 21 capable of simultaneous multi-beam and side-scan data collection and, as a separate payload, black & white still photography down to 1,500 meters (4,921 feet).
The ROV will be a Submersible Systems, Inc. (SSI) TRV 005 capable of depths down to 1,000 meters (3,300 feet).
Documentation
The Discovery Channel will have a three-person film crew aboard shooting video for a two-hour special to air later this year. Mark Smith of Oh Seven Films will be shooting video for TIGHAR. Daily reports will be posted on the TIGHAR website at Niku Dailies.
Expedition Itinerary
Thur. 6/14
ROV and associated equipment depart Patterson, Louisiana via FedEx Freight (truck).
Tue. 6/19
ROV and associated equipment arrive Long Beach, CA.
Wed. 6/20
ROV and associated equipment depart Long Beach via FedEx Ocean (ship).
Mon. 6/25
AUV and associated equipment depart Quincy, Massachusetts via FedEx Express (air).
Tue. 6/26
ROV and AUV arrive Honolulu.
Wed. 6/27
Ric Gillespie, camera crews and Phoenix Int'l crew arrive Honolulu.
Thur. 6/28
ROV, AUV and associated equipment loaded aboard R/V K-O-K.
Sat. 6/30
TIGHAR team arrives.
Sun. 7/1
Dockside trials of AUV and ROV. Press event dockside hosted by FedEx and Discovery Channel.
Mon. 7/2
Departure press event dockside.
Tues. 7/3
Expedition departs 08:00.
Mon. 7/9
Expedition arrives Nikumaroro. Begin search operations.
Thur. 7/19
Conclude search operations. Depart Nikumaroro.
Fri. 7/27
Expedition arrives Honolulu.
Sat. 7/28
Demobilization.
Expedition Team
1
Richard Gillespie – TIGHAR Executive Director & Expedition Leader
Special thanks to the corporate sponsors of the Earhart Project, who made this expedition possible.
photekimaging.com
digitalglobe.com
markertek.com
thursby.com
sibfla.com
journeysaviation.com
lehightesting.com
whiteselectronics.com
To help us complete the budget and carry out this important mission please click on the link below. All contributors will receive a Niku VII Certificate of Participation as sponsor of the expedition.
To make a donation to the Earhart Project, click HERE.
The
Earhart Project is funded by charitable contributions. Donations by check
(payable to TIGHAR) or credit card (Visa, Discover, American Express or Master Card) may be sent to TIGHAR,
The Earhart Project, 2366 Hickory Hill Road, Oxford, PA 19363, USA, or click on
the link above to make your contribution. Confidential inquiries regarding
sponsorship opportunities for individuals or corporations should be addressed
to Executive Director Richard Gillespie (email Ric@tighar.org).
Copyright 2021 by TIGHAR, a non-profit foundation.
No portion of the TIGHAR Website may be reproduced by xerographic,
photographic, digital or any other means for any purpose. No portion
of the TIGHAR Website may be stored in a retrieval system, copied,
transmitted or transferred in any form or by any means, whether electronic,
mechanical, digital, photographic, magnetic or otherwise, for any purpose
without the express, written permission of TIGHAR. All rights reserved.







 Step 2. Search the mapped area with side-scan sonar mounted on the AUV. The AUV is an unmanned, free-swimming robotic submersible that is programmed to carry out a particular search mission using its own onboard inertial navigation system. It is battery-powered and has a potential endurance of up to 24 hours, although our missions will be much shorter – probably no more than six hours. At the end of a mission the AUV is recovered, the data it has collected are downloaded, the batteries are swapped out for fresh ones, and the AUV is reprogrammed and launched for another mission. The data downloaded from the first mission are then analyzed and any targets of interest flagged for future investigation.
Step 2. Search the mapped area with side-scan sonar mounted on the AUV. The AUV is an unmanned, free-swimming robotic submersible that is programmed to carry out a particular search mission using its own onboard inertial navigation system. It is battery-powered and has a potential endurance of up to 24 hours, although our missions will be much shorter – probably no more than six hours. At the end of a mission the AUV is recovered, the data it has collected are downloaded, the batteries are swapped out for fresh ones, and the AUV is reprogrammed and launched for another mission. The data downloaded from the first mission are then analyzed and any targets of interest flagged for future investigation.